
Inhaltsverzeichnis
- Einleitung
- Methoden der Navigation
2.1 Astronavigation
2.1.1 Theorie der Astronavigation
2.1.2 Anwendung der Astronavigation
2.2 Global Positioning System (GPS)
2.2.1 Funktionsweise des GPS
2.2.2 Anwendungsbereiche des GPS - Zukunft der Navigation
Literaturverzeichnis
Abbildungsverzeichnis
1. Einleitung
Der Begriff Navigation ist die Zusammensetzung von zwei lateinischen Wörtern. Zum einen navis, was Schiff bedeutet, zum anderen agare, was in diesem Zusammenhang mit zu führen oder zu lenken übersetzt wird (Grewal et al. 2020). Die Navigation arbeitet über die Methoden der Positionierung und Orientierung und findet so einen Weg von Punkt A nach Punkt B. Anwendungen finden sich überall dort, wo kontrollierte Bewegung stattfindet. Sei es nun am Boden, auf See, in der Luft oder im Weltall (Hofmann-Wellenhof et al. 2003). Die Entwicklung der Methoden der Navigation ist verknüpft mit dem Fortschritt in der Mathematik und technischer Innovationen. (Link zum Thema Kartenprojektionen)
2. Methoden der Navigation
2.1 Astronavigation
Die Geschichte der Astronavigation beginnt in der Mitte des 6. Jahrhunderts v.Chr. und wird vor allem durch griechische Astronomen beeinflusst (Hofmann-Wellenhof et al. 2003; Couprie 2011). Im Laufe der Jahrhunderte werden verschiedene Instrumente entwickelt, um sich an den Himmelskörpern zu orientieren. Eine dieser Erfindungen ist der Sextant. Im Jahr 1731 von John Hadley entwickelt, findet er heute noch Anwendung (Schmidt 1996). Die Bestimmung der geographischen Länge ist im Gegensatz zur geographischen Breite bis ins 18. Jahrhundert ein großes Problem in der Seefahrt. Erst durch die Entwicklung des Chronometers durch John Harrison (1693-1776) wird dieses Problem gelöst (Johnson 1989). Zusätzlich zu diesen Hilfsmitteln spielt der Kompass im Hintergrund eine wichtige Rolle (Schmidt 1996). Mit diesen Instrumenten ist es möglich die geographische Länge und die geographische Breite zu finden. Doch um diese zu bestimmen wird Wissen über ein geeignetes Koordinatensystem und Erdmodell verlangt (Abb. 2).
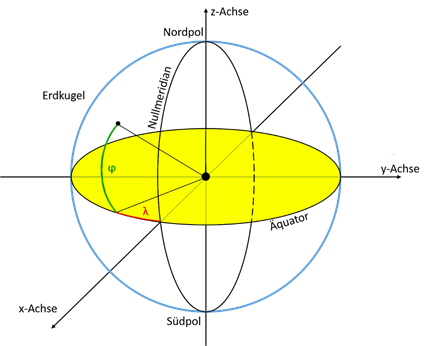
(Nach: van Allen 2004)
Hierzu wird die Oberfläche der Erde durch eine Kugel, mit einem einheitlichen Radius, angenähert. Die Rotation dieser Kugel bleibt gleichmäßig. Durch die Rotationsachse der Erdkugel verläuft die z-Achse. Durch den Schnitt von Äquator und Nullmeridian verläuft die x-Achse. Orthogonal zur x-Achse und zur z-Achse verläuft die y-Achse. Die Ebene, die x-Achse und y-Achse aufspannen, wird als Äquatorebene bezeichnet. An den Schnittpunkten der z-Achse mit der Erdkugel befinden sich Nord- und Südpol (van Allen 2004; Rousseau et al. 2012). Eine Position auf der Erdkugel wird durch zwei Winkelangaben definiert. Zum einen wird die geographische Länge λ (Lambda) benötigt zum anderen die geographische Breite ϕ (Phi). Von der Äquatorebene aus wird ϕ gemessen. Die Winkelangaben werden dabei auf 90° für die Nordhalbkugel und -90° für die Südhalbkugel beschränkt. Ausgehend von der x-Achse wird λ gemessen. Beschränkt wird der Wert auf 180° und es wird zwischen West und Ost unterschieden (Rousseau et al. 2012).
2.1.1 Theorie der Astronavigation
Die Funktionsweise der Astronavigation beruht auf der Beobachtung von Sternen, Planeten, der Sonne und dem Mond, deren Position bekannt ist (van Allen 2004). Dabei wird die Position eines Sterns in einem ähnlichen Koordinatensystem wie dem der Erde beschrieben. Dazu wird um die Erdkugel eine deutlich größere Himmelskugel gelegt. Wie viel größer ist dabei nicht relevant, da die Position eines Himmelskörpers nicht über den Abstand definiert wird. Auf der Innenseite dieser Himmelskugel werden die Himmelskörper verortet. Der Mittelpunkt und die Wahl der Achsen des für die Erdkugel definierten Koordinatensystems bleiben dieselben. Die z-Achse schneidet die Himmelskugel im Himmelsnordpol und Himmelssüdpol. Die vorher definierte Äquatorebene schneidet die Himmelskugel. Dadurch, dass das Gradnetz der Erdkugel auf die Himmelskugel projiziert wird, kann der Breitengrad eines Himmelskörpers genau wie bei den geographischen Koordinaten gefunden werden. Der Name ändert sich allerdings zu Deklination. Die Deklination entspricht den Breitengraden auf der Erde. Zur Eindeutigkeit der Längengrade auf der Erdkugel dient der Nullmeridian. Auf der Himmelskugel dient das Frühlingsäquinoktikum als Referenzpunkt für die Rektaszension, den Längengraden auf der Himmelskugel. Dieser entsteht durch die um 23,44° zum Äquator geneigte Ekliptik der Erde. (Hier geht es zum Thema Erdbahnparameter) Im Schnitt der Ekliptikebene mit der Äquatorebene befindet sich der Frühlingsäquinoktikum. Diese Art der Verortung von Himmelskörpern wird Äquatorialsystem genannt (van Allen 2004; Schmidt 1996; Schombert). Sobald ein Himmelskörper genau im Zenit über einen Beobachtungspunkt auf der Erde steht, befindet sich dieser Punkt und der Stern auf einer Geraden. So lässt sich direkt von der Deklination und Rektaszension auf den Längen- und Breitengrad schließen.
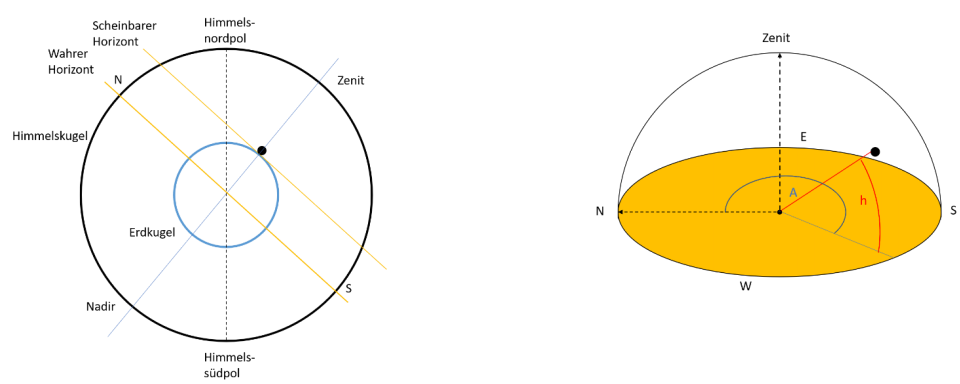
Ein weiteres System, das der Anwendung etwas näher ist, wird Horizontalsystem genannt. Die Position des Beobachters bildet mit der Horizontlinie eine Ebene. Diese Ebene schneidet die Himmelskugel und bildet so den scheinbaren Horizont. Die hierzu parallele Ebene durch den Ursprung wird der wahre Horizont genannt. Durch den Ursprung und orthogonal zum wahren Horizont wird die Scheitellinie gefällt. Diese schneidet die Himmelskugel im Zenit (Z) und Nadir (Nd). Der Zenit befindet sich bei +90° von der wahren Horizontlinie und der Nadir bei -90°. Auf dem wahren Horizont wird Norden (N) als der Punkt definiert, der dem Himmelsnordpol am nächsten ist. Daraus folgen dann Süden (S), Westen (W) und Osten (E). Der Großkreis, der durch N, Z, S verläuft wird als Himmelsmeridian bezeichnet. Die Position eines Himmelskörpers wird durch zwei Winkelangaben definiert. Zum einen den Azimut (A) und die wahre Höhe (h). Das Azimut ist der Winkel gemessen im Uhrzeigersinn von der Nordrichtung aus. Die wahre Höhe ist der vom wahren Horizont ausgehende Winkel Richtung Zenit. Ein bedeutender Nachteil ist, dass bei diesem System die wahre Höhe und das Azimut im Laufe des Tages ständig verändern. Außerdem hängt das Referenzsystem vom Standort des Beobachters ab (Schmidt 1996; Schombert).
2.1.2 Anwendung der Astronavigation
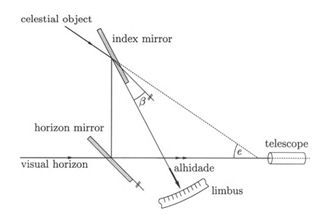
Ein Sextant ist ein sehr genaues Winkelmessgerät. Seinen Namen hat es daher, dass es den sechsten Teil eines Kreises misst. In seiner einfachsten Form befinden sich an einem Sextanten ein Fernrohr (telescope), ein kleiner Spiegel (horizon mirror), ein großer Spiegel (index mirror) und die Alhidade (alhidade) mit der zugehörigen Skala (limbus). Siehe dazu Abbildung 4. Der kleine Spiegel ist zur Hälfte durchsichtig und ist auf die Kimm (Horizont) gerichtet. Der große Spiegel dient zur Messung der Gestirnshöhe. Er ist an der Alhidade befestigt und verändert seine Ausrichtung während der Messung. Mit der Alhidade wird die Winkeleinstellung vorgenommen, indem sie auf der Skala bewegt wird. Um die Höhe des Gestirns über der Kimm anzugeben, wird der Winkel zwischen zwei Lichtstrahlen bestimmt. Dieser Winkel lässt sich über die Geometrie der doppelten Reflektion herleiten. Diese besagt: 2𝛽 = 𝑒. Wobei β der Winkel ist, um den die Alhidade verstellt werden musste, sodass der Himmelskörper auf gleicher Höhe mit der Kimm im kleinen Spiegel zu sehen ist (Hofmann-Wellenhof et al. 2003). In Abbildung 5 ist der Messablauf zu sehen.
File:Using sextant swing.gif – Wikimedia Commons
{kind=link}
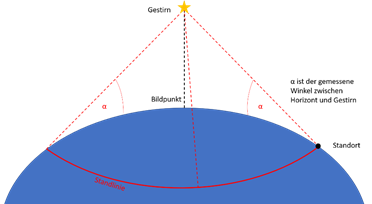
Um den Standort zu bestimmen wird die Position des Gestirns zum Zeitpunkt der Messung in Greenwich-Zeit benötigt. Der gemessene Winkel zwischen Horizont und Gestirn kann an verschieden Standorten auf der Welt zur gleichen Zeit gemessen werden. Dadurch entsteht eine Linie mit möglichen Standorten. Diese Linien wird Standlinie genannt (Abb. 6). Wird eine zweite Messung zu einem zweiten Gestirn zur gleichen Zeit durchgeführt und dazu eine Standlinie berechnet, so schneiden sich diese beiden Kreise in zwei Punkten. Nun kann durch das Ausschlussprinzip der Standort ausgewählt werden (Schmidt 1996; Roy & Clarke 2003).
2.2 Global Positioning System (GPS)
Das GPS kann jederzeit den genauen Standpunkt bestimmen. Dabei wird das System in das Weltraum-Segment, das Kontroll-Segment und das Nutzer-Segment unterteilt. Das Weltraum-Segment beinhaltet die Satelliten, die sich in einem Medium Earth Orbit (MEO) in 20.200km Höhe mindestens zu viert auf sechs unterschiedlichen Orbitalbahnen befinden. Neben dieser Mindestanforderung bewegen sich noch weitere GPS-Satelliten auf den Umlaufbahnen. Zum einen, um bei einem Ausfall als Ersatz zu dienen, zum anderen, um die Genauigkeit zu erhöhen (Dunbar 2014).
2.2.1 Funktionsweise des GPS
Die Satelliten senden periodisch Radiowellen aus, die von geeigneten Empfängern verarbeitet werden. Durch die festen Umlaufbahnen können die Positionen der Satelliten berechnet werden und sind zu jeder Zeit bekannt. Die vorausberechneten Positionen werden im Almanach gespeichert. Für eine Positionsbestimmung in einem Modell, in dem genaue Zeitmessung immer möglich ist, werden drei Satelliten benötigt. Die Methode, die hinter der Positionsbestimmung steht, kann mit der Trilateration verglichen werden. Die ausgesendeten Radiowellen des ersten Satelliten (S1) erreichen einen Empfänger (E), der mittels der Zeit (t1), die das Signal vom Satelliten bis zum Empfänger benötigt, die Strecke (r1) zwischen diesen beiden mittels der Lichtgeschwindigkeit berechnet.
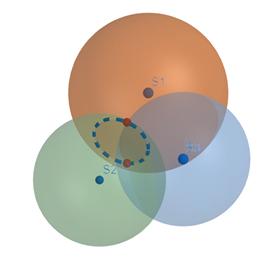
Daraus lässt sich schließen, dass die gesuchte Position einen Abstand von r1 vom Satelliten S1 hat. In einem dreidimensionalen Raum, in dem sich dieses Modell befindet, bedeutet das, dass sich der Empfänger irgendwo auf einer Kugel um den Satelliten S1 befindet. Mittels der Methode der Abstandsmessung über die Zeit des Signals und der Lichtgeschwindigkeit, können nun noch die Abstände zu den Satelliten S2 und S3 berechnet werden. Auch bei diesen beiden entstehen Kugeln mit den Satelliten als Mittelpunkte. Werden nun die Kugeln um die Satelliten S1 und S2 miteinander verschnitten, so werden die möglichen Punkte auf einen Kreis reduziert. Dieser Kreis wird wiederum mit der Kugel um den Satelliten S3 geschnitten, sodass die Anzahl der möglichen Standorte auf zwei sinkt (Abb. 7). Durch die Anordnung der Satelliten im Raum kann einer dieser Punkte ausgeschlossen werden, da sich dieser zu weit von der Erdoberfläche entfernt befindet (Rousseau et al. 2012).
Der gemessene Abstand ist stark von der Genauigkeit der Uhren abhängig, da bereits die Abweichung einer millionstel Sekunde zu einer Ungenauigkeit von bis zu 300m führen kann. In den GPS-Satelliten werden deshalb Atomuhren verbaut. Eine solche Aufrüstung für jeden Empfänger wäre allerdings eine zu große Investition (Herring 1996). Die Kugeln um die Satelliten sind entweder zu groß, das ist der Fall, wenn die Empfängeruhr zu schnell läuft, oder zu klein, wenn die Empfängeruhr zu langsam läuft (Herring 1996). Ein vierter Satellit soll den durch die Ungenauigkeit der Empfängeruhr verursachten clock offset (τ) bestimmen. Der Empfänger zu dem ersten Satelliten (S1) misst eine fiktive Laufzeit (T1). Um die genaue Position zu bestimmen, wird allerdings die wahre Laufzeit (t1) benötigt.
Der clock offset wird für alle Satelliten als gleich angenommen (Rousseau et al. 2012). Die Mathematik zu diesem Kapitel ist in Rousseau et al. 2012 nachzulesen.
2.2.2 Anwendungsbereiche des GPS
Die Anwendungsmöglichkeiten des GPS sind zahlreich. Daher wird hier nur ein kleiner Teil der Möglichkeiten aufgezeigt. Neben der offensichtlichen Anwendung in der alltäglichen Navigation, wird das GPS in Verbindung mit geographischen Informationssystemen (GIS) auch in der Landwirtschaft angewendet. Dort werden genaue Karten der bewirtschafteten Felder erstellt, die Informationen über die Bodenbeschaffenheit erhalten. So kann der Landwirt entscheiden wo und in welchen Mengen Dünger und Pestizide aufgetragen werden müssen (Rey 2006). Durch Verbesserungen im GPS nutzen Geologen das System, um die Plattenverschiebung zu dokumentieren oder durch Änderung der Satelliten ihrer Umlaufbahn das Gravitationsfeld der Erde zu erforschen (Evans et al. 2002; Herring 1996). Meteorologen machen sich eine Fehlerquelle im GPS zu nutze. Die Radiowellen, die von den Satelliten ausgesendet werden, müssen die Atmosphäre durchqueren. Wenn sie die geladene Ionosphäre passieren, werden die Radiowellen gestreckt, während sie in der Troposphäre wieder zusammengedrückt werden. Die daraus resultierenden Unregelmäßigkeiten können gemessen werden und daraus Rückschlüsse auf den Wassergehalt in der Troposphäre gezogen werden (Herring 1996).
3. Zukunft der Navigation
Die vorangegangenen Kapitel haben sich damit beschäftigt wie eine Position auf der Erdoberfläche gefunden werden kann. Doch im Themenfeld der Navigation kann der Maßstab sowohl größer als auch kleiner werden. Wird der Begriff Navigation allgemein ausgelegt, geht es darum sich in einem Raum zurecht zu finden und zu bewegen. Dieser Raum war bislang die Erdoberfläche, doch er kann auf das Weltall ausgedehnt oder auf ein Zimmer, eine Wohnung oder ein Haus beschränkt werden.
Die Innenraum Navigation bedient sich verschiedener Techniken. Die Position kann zum Beispiel über einen am Körper getragenen RFID Chip und im Raum verteilten RFID Empfängern bestimmt werden. Die FH-Dortmund hat dazu geforscht und dazu einen Forschungsbericht veröffentlicht (Röhrig et al. 2016). (EL_24_3_14.pdf (engineeringletters.com))
Mit ähnlichen Methoden kann auch mit einem Infrarot System, Ultraschall, Wifi oder Bluetooth die Position bestimmt werden (Fallah et al. 2013).
Im Weltall befindet sich die gesuchte Position zu weit von der Erdoberfläche entfernt, sodass eine Navigation mit dem GPS nicht möglich ist. Der Blick geht wieder Richtung Sterne. Die Apollo Mission hat einen Space Sextanten an Bord gehabt. Anhand dieser periodisch durchgeführten Winkelmessungen zur Sonne, nahen Planeten und ausgewählten Sternen kann die Position im Weltall bestimmt werden (Hoag 1983). Ist der Wunsch allerdings, noch weiter unter tiefer ins Weltall vorzudringen ist eine Positionsbestimmung anhand von Winkeln nicht vorteilhaft. Wird die Position im Weltall anhand von Winkeln in einem Kugelkoordinatensystem definiert, dass seinen Ursprung in der Mitte der Sonne hat, kann die Position bis auf 5 m genau bestimmt werden. Ein Fehler in der Messung von 0.1 Bogensekunden würde auf der Entfernung von Jupiter schon eine Ungenauigkeit von 300 km bedeuten. Entfernt sich die Position noch weiter bis auf die Entfernung von Pluto, bedeutet derselbe Fehler nun schon eine Ungenauigkeit von 2300 km. Um diesen Fehler zu umgehen, wurde ein neues System entwickelt, dass die natürlichen Radiowellen oder Röntgenstrahlen der Pulsare zur Navigation benutzt (Downs 1974). Pulsare ermöglichen es im Weltall zu navigieren, indem sie die Funktion der Satelliten erfüllen (Xiong et al. 2012).
Literatur
Couprie, D. (2011): Heaven and earth in ancient Greek cosmology. From Thales to Heraclides Ponticus. New York, NY (= Astrophysics and space science library 374).
Downs, G. (1974): Interplanetary Navigation Using Pulsating Radio Sources.
Dunbar, B. (2014): Global Positioning System. https://www.nasa.gov/directorates/heo/scan/communications/policy/GPS.html [31.12.2020].
Evans, A.; Swift Everett R.; Cunnigham James P.; Hill Robert W.; Blewitt Geoffrey; Yunck, T.; Lichten, S.; Hatch, R.; Malys, S.; Bossler, J. (2002): The Global Positioning System Geodesy Odyssey. In: Navigation 49 (1): 7–33.
Fallah, N.; Apostolopoulos, I.; Bekris, K.; Folmer, E. (2013): Indoor Human Navigation Systems: A Survey. In: Interacting with Computers 25 (1).
Gaspar, Joaquim Alves (2007): Using sextant swing.
File:Using sextant swing.gif – Wikimedia Commons [15.03.2021]
Grewal, M.; Bartone, C.; Andrews, A. (2020): Global navigation satellite systems, inertial navigation, and integration. 4. Aufl., Hoboken, N.J.
Herring, T. (1996): The Global Positioning System. In: Scientific American 274 (2): 44–50. http://www.jstor.org/stable/24989397.
Hoag, D. (1983): The history of Apollo onboard guidance, navigation, and control. In: Journal of Guidance, Control, and Dynamics 6 (1): 4–13.
Hofmann-Wellenhof, B.; Legat, K.; Wieser, M. (2003): Navigation. Principles of Positioning and Guidance. Vienna, s.l.
Johnson, P. (1989): The Board of Longitude 1714-1828. In: Journal of the British Astronomical Association 99 (2): 63–69.
Rey, R. (2006): A Introduction to GPS. https://journals.flvc.org/edis/article/view/115972/114164 [15.03.2021].
Rousseau, C.; Saint-Aubin, Y.; Antaya, H.; Ascah-Coallier; Stern, M. (2012): Mathematik und Technologie. Berlin (= Springer-Lehrbuch ).
Roy, A.; Clarke, D. (2003): Astronomy. Principles and practice. 4. Aufl., Bristol.
Röhrig, C., Heß & Künemund, F. (2016), „RFID-Based Localization of Mobile Robots Using the Received Signal Strength Indicator of Detected Tags“, Engineering Letters., August, 2016. Vol. 24(3), S. 338-346.
Schmidt, W. (1996): Astronomische Navigation. Ein Lehr- und Handbuch für Studenten und Praktiker. 2. Aufl., Berlin, Heidelberg.
Schombert, J.: Earth coordinate systems. http://abyss.uoregon.edu/~js/ast121/lectures/lec03.html [18.12.2020].
van Allen, J. (2004): Basic principles of celestial navigation. In: American Journal of Physics 72 (11): 1418–1424.
Xiong, Z.; Qiao, L.; Liu, J.; Jiang, B. (2012): GEO Satellite Autonoumous Navigation Using X-Ray Pulsar Navigation and GNSS Measurments. In: International Journal of Innovative Computing, Information and Control 8 (5(A)): 2965–2977.
Abbildungsverzeichnis
Abbildung 1 Graphical Abstract
Abbildung 2 Definition von geographischen Koordinaten und Anschauung der Erdkugel mit Koordinatensystem. Nach: (van Allen 2004)
Abbildung 3 Das Horizontalsystem. Nach: (Schmidt 1996; Schombert)
Abbildung 4 Funktionsweise eines Sextanten. (Hofmann-Wellenhof et al. 2003)
Abbildung 5 Animation, die den Gebrauch eines Sextanten zur Messung der Sonnenhöhe
Abbildung 6 Standlinie Nach: (Schmidt 1996)
Abbildung 7 Geometrie des GPS. Erstellt mit Geogebra. Nach: (Rousseau et al. 2012)